Research advances in bio-inspired geotechnics
-
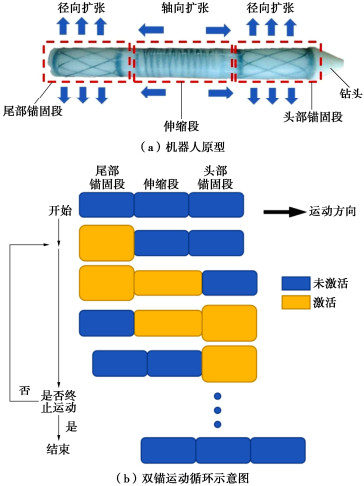
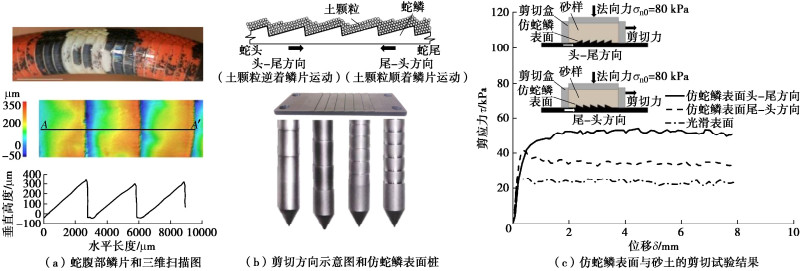
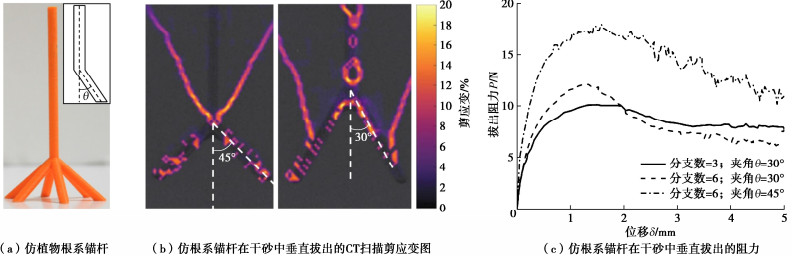
摘要: 岩土体中生存的生物使用独特的生物机制与岩土体相互作用,以完成土中运动、生长、锚固和吸收养分等功能。这些生物机制可被岩土工程借鉴和利用。仿生岩土是从形态、行为和原理上研究生物机制,将其用于发展岩土工程理论、技术和装备,用来解决岩土工程问题的新方向。近年来,仿生岩土技术逐渐成为了岩土工程界的一个引人注意的课题,并取得了一些进展。首先,介绍了仿生岩土技术的设计思路和过程以及主要研究方法。然后,总结并分析了不同生物机制在土中贯入与掘进、土与结构相互作用接触面和土中锚固系统等方面的研究现状和进展,其中典型的生物机制包括生物土中运动、蛇腹鳞摩擦各向异性和树木根系结构等。最后探讨了仿生岩土技术所面临的挑战和未来展望。Abstract: Many biological organisms use morphologically, behaviourally and schematically the unique strategies to interact with soils and rocks, and perform functions such as moving in soils, growing in soils, anchoring, and assimilating nutriment. For the bio-inspired geotechnics, these biological strategies are investigated and used to develop new theories and technologies in geotechnical engineering. In recent years, the bio-inspired geotechnics have gradually become an interesting topic in the geotechnical research community. The research methodologies and tools for the bio-inspired geotechnics are introduced. The research advances in different biological strategies and their potential application fields are introduced and analyzed, such as exactions and penetrations of biological organisms in soils, friction behaviour between soils and biological organisms, and biological anchorage mechanisms, etc. The opportunities and challenges in the bio-inspired geotechnics are also discussed.
-
-
![]()
![]()
![]()
-
[1] MARTINEZ A, DEJONG J, AKIN I, et al. Bio-inspired geotechnical engineering: principles, current work, opportunities and challenges[J]. Géotechnique, 2022, 72(8): 687-705. doi: 10.1680/jgeot.20.P.170
[2] 何稼, 楚剑, 刘汉龙, 等. 微生物岩土技术的研究进展[J]. 岩土工程学报, 2016, 38(4): 643-653. doi: 10.11779/CJGE201604008 HE Jia, CHU Jian, LIU Hanlong, et al. Research advances in biogeotechnologies[J]. Chinese Journal of Geotechnical Engineering, 2016, 38(4): 643-653. (in Chinese) doi: 10.11779/CJGE201604008
[3] 徐华, 袁海莉, 王歆宇, 等. 根系形态和层次结构对根土复合体力学特性影响研究[J]. 岩土工程学报, 2022, 44(5): 926-935. doi: 10.11779/CJGE202205016 XU Hua, YUAN Haili, WANG Xinyu, et al. Influences of morphology and hierarchy of roots on mechanical characteristics of root-soil composites[J]. Chinese Journal of Geotechnical Engineering, 2022, 44(5): 926-935. (in Chinese) doi: 10.11779/CJGE202205016
[4] ORTIZ D, GRAVISH N, TOLLEY M T. Soft robot actuation strategies for locomotion in granular substrates[J]. IEEE Robotics and Automation Letters, 2019, 4(3): 2630-2636. doi: 10.1109/LRA.2019.2911844
[5] ISAKA K, TSUMURA K, WATANABE T, et al. Soil discharging mechanism utilizing water jetting to improve excavation depth for seabed drilling explorer[J]. IEEE Access, 2020, 8: 28560-28570. doi: 10.1109/ACCESS.2020.2972572
[6] ISAKA K, TSUMURA K, WATANABE T, et al. Development of underwater drilling robot based on earthworm locomotion[J]. IEEE Access, 2019, 7: 103127-103141. doi: 10.1109/ACCESS.2019.2930994
[7] MALLETT S D, MATSUMURA S, DAVID FROST J. Additive manufacturing and computed tomography of bio-inspired anchorage systems[J]. Géotechnique Letters, 2018, 8(3): 219-225. doi: 10.1680/jgele.18.00090
[8] PATINO-RAMIREZ F, ARSON C. Transportation networks inspired by leaf venation algorithms[J]. Bioinspiration & Biomimetics, 2020, 15(3): 036012.
[9] KAR A K. Bio-inspired computing: a review of algorithms and scope of applications[J]. Expert Systems With Applications, 2016, 59: 20-32. [10] DEJONG J T, BURRALL M, WILSON D W, et al. A bio-inspired perspective for geotechnical engineering innovation[C]// Proceeding of Geotechnical Frontiers 2017: Transportation Facilities, Structures, and Site Investigation. Orlando, 2017: 862-870.
[11] GOEL A K, VATTAM S, WILTGEN B, et al. Information-processing theories of biologically inspired design[M]//Biologically Inspired Design. London: Springer London, 2013: 127-152. [12] MAK T W, SHU L H. Abstraction of biological analogies for design[J]. CIRP Annals, 2004, 53(1): 117-120. doi: 10.1016/S0007-8506(07)60658-1
[13] MARTINEZ A, PALUMBO S, TODD B D. Bioinspiration for anisotropic load transfer at soil–structure interfaces[J]. Journal of Geotechnical and Geoenvironmental Engineering, 2019, 145(10): 04019074. doi: 10.1061/(ASCE)GT.1943-5606.0002138
[14] SHIN H, SANTAMARINA J C. Open-mode discontinuities in soils[J]. Géotechnique Letters, 2011, 1(4): 95-99. doi: 10.1680/geolett.11.00014
[15] DORGAN K M. The biomechanics of burrowing and boring[J]. Journal of Experimental Biology, 2015, 218(2): 176-183. doi: 10.1242/jeb.086983
[16] BORELA R, FROST J D, VIGGIANI G, et al. Earthworm-inspired robotic locomotion in sand: an experimental study using X-ray tomography[J]. Géotechnique Letters, 2021, 11(1): 66-73. http://www.researchgate.net/publication/348936188_Earthworm-inspired_robotic_locomotion_in_sand_an_experimental_study_with_X-ray_tomography
[17] TAO J J, HUANG S C, TANG Y. SBOR: a minimalistic soft self-burrowing-out robot inspired by razor clams[J]. Bioinspiration & Biomimetics, 2020, 15(5): 055003. http://pubmed.ncbi.nlm.nih.gov/32259805/
[18] O'HARA K B, MARTINEZ A. Monotonic and cyclic frictional resistance directionality in Snakeskin-inspired surfaces and piles[J]. Journal of Geotechnical and Geoenvironmental Engineering, 2020, 146(11): 04020116. doi: 10.1061/(ASCE)GT.1943-5606.0002368
[19] BAUM M J, KOVALEV A E, MICHELS J, et al. Anisotropic friction of the ventral scales in the snake Lampropeltis getula Californiae[J]. Tribology Letters, 2014, 54(2): 139-150. doi: 10.1007/s11249-014-0319-y
[20] MOSELEY P, FLOREZ J M, SONAR H A, et al. Modeling, design, and development of soft pneumatic actuators with finite element method[J]. Advanced Engineering Materials, 2016, 18(6): 978-988. doi: 10.1002/adem.201500503
[21] CHEN Y Y, KHOSRAVI A, MARTINEZ A, et al. Modeling the self-penetration process of a bio-inspired probe in granular soils[J]. Bioinspiration & Biomimetics, 2021, 16(4): 046012. http://pubmed.ncbi.nlm.nih.gov/33794505/
[22] LI C, ZHANG T N, GOLDMAN D I. A terradynamics of legged locomotion on granular media[J]. Science, 2013, 339(6126): 1408-1412. doi: 10.1126/science.1229163
[23] TRIVEDI D, RAHN C D, KIER W M, et al. Soft robotics: biological inspiration, state of the art, and future research[J]. Applied Bionics and Biomechanics, 2008, 5(3): 99-117. doi: 10.1155/2008/520417
[24] KIM S, LASCHI C, TRIMMER B. Soft robotics: a bioinspired evolution in robotics[J]. Trends in Biotechnology, 2013, 31(5): 287-294. doi: 10.1016/j.tibtech.2013.03.002
[25] SHAH D S, POWERS J P, TILTON L G, et al. A soft robot that adapts to environments through shape change[J]. Nature Machine Intelligence, 2021, 3(1): 51-59. http://www.xueshufan.com/publication/3107437201
[26] RUS D, TOLLEY M T. Design, fabrication and control of soft robots[J]. Nature, 2015, 521(7553): 467-475. doi: 10.1038/nature14543
[27] LIU B Y, OZKAN-AYDIN Y, GOLDMAN D I, et al. Kirigami skin improves soft earthworm robot anchoring and locomotion under cohesive soil[C]// 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft). Seoul, 2019: 828-833.
[28] HUANG S C, TANG Y, BAGHERI H, et al. Effects of friction anisotropy on upward burrowing behavior of soft robots in granular materials[J]. Advanced Intelligent Systems, 2020, 2(6): 1900183. doi: 10.1002/aisy.201900183
[29] NACLERIO N D, KARSAI A, MURRAY-COOPER M, et al. Controlling subterranean forces enables a fast, steerable, burrowing soft robot[J]. Science Robotics, 2021, 6(55): eabe2922. doi: 10.1126/scirobotics.abe2922
[30] SADEGHI A, TONAZZINI A, POPOVA L, et al. A novel growing device inspired by plant root soil penetration behaviors[J]. PLoS One, 2014, 9(2): e90139. doi: 10.1371/journal.pone.0090139
[31] KIER W M. The diversity of hydrostatic skeletons[J]. Journal of Experimental Biology, 2012, 215(8): 1247-1257. doi: 10.1242/jeb.056549
[32] DORGAN K M. Kinematics of burrowing by peristalsis in granular sands[J]. Journal of Experimental Biology, 2018, 221(10): jeb167759.
[33] DORGAN K M, ARWADE S R, JUMARS P A. Burrowing in marine muds by crack propagation: kinematics and forces[J]. Journal of Experimental Biology, 2007, 210(23): 4198-4212. doi: 10.1242/jeb.010371
[34] RUIZ S, OR D, SCHYMANSKI S J. Soil penetration by earthworms and plant roots: mechanical energetics of bioturbation of compacted soils[J]. PLoS One, 2015, 10(6): e0128914. doi: 10.1371/journal.pone.0128914
[35] HOLLAND A F, DEAN J M. The biology of the stout razor clam tagelus plebeius: Ⅰ Animal-sediment relationships, feeding mechanism, and community biology[J]. Chesapeake Science, 1977, 18(1): 58-66. doi: 10.2307/1350364
[36] WINTER A G, DEITS R L, HOSOI A E. Localized fluidization burrowing mechanics of ensis directus[J]. Journal of Experimental Biology, 2012, 215(12): 2072-2080. doi: 10.1242/jeb.058172
[37] CLARK L J, WHALLEY W R, BARRACLOUGH P B. How do roots penetrate strong soil? [M]//Roots: The Dynamic Interface between Plants and the Earth. Dordrecht: Springer Netherlands, 2003: 93-104.
[38] SADEGHI A, TONAZZINI A, POPOVA L, et al. Robotic mechanism for soil penetration inspired by plant root[C]// 2013 IEEE International Conference on Robotics and Automation. Paris, 2013: 3457-3462.
[39] DEL DOTTORE E, MONDINI A, SADEGHI A, et al. An efficient soil penetration strategy for explorative robots inspired by plant root circumnutation movements[J]. Bioinspiration & Biomimetics, 2017, 13(1): 015003. http://pubmed.ncbi.nlm.nih.gov/29123076/
[40] WEI H Y, ZHANG Y L, ZHANG T, et al. Review on bioinspired planetary regolith-burrowing robots[J]. Space Science Reviews, 2021, 217(8): 87. doi: 10.1007/s11214-021-00863-2
[41] SHARPE S S, KUCKUK R, GOLDMAN D I. Controlled preparation of wet granular media reveals limits to lizard burial ability[J]. Physical Biology, 2015, 12(4): 046009. doi: 10.1088/1478-3975/12/4/046009
[42] MCKEE A, MACDONALD I, FARINA S C, et al. Undulation frequency affects burial performance in living and model flatfishes[J]. Zoology, 2016, 119(2): 75-80. doi: 10.1016/j.zool.2015.12.004
[43] MALADEN R D, DING Y, LI C, et al. Undulatory swimming in sand: subsurface locomotion of the sandfish lizard[J]. Science, 2009, 325(5938): 314-318. doi: 10.1126/science.1172490
[44] MALADEN R D, DING Y, UMBANHOWAR P B, et al. Mechanical models of sandfish locomotion reveal principles of high performance subsurface sand-swimming[J]. Journal of the Royal Society, Interface, 2011, 8(62): 1332-1345. doi: 10.1098/rsif.2010.0678
[45] BUARQUE DE MACEDO R, ANDÒ E, JOY S, et al. Unearthing real-time 3D ant tunneling mechanics[J]. Proceedings of the National Academy of Sciences, 2021, 118(36): e2102267118. doi: 10.1073/pnas.2102267118
[46] IAI S. Geotechnics and Earthquake Geotechnics Towards Global Sustainability[M]. Dordrecht: Springer, 2011.
[47] MONAENKOVA D, GRAVISH N, RODRIGUEZ G, et al. Behavioral and mechanical determinants of collective subsurface nest excavation[J]. The Journal of Experimental Biology, 2015, 218(9): 1295-1305. doi: 10.1242/jeb.113795
[48] MARTINEZ A, DEJONG J T, JAEGER R A, et al. Evaluation of self-penetration potential of a bio-inspired site characterization probe by cavity expansion analysis[J]. Canadian Geotechnical Journal, 2020, 57(5): 706-716. doi: 10.1139/cgj-2018-0864
[49] CORTES D, JOHN S. Earthworm-inspired soil penetration[C]// Proceedings of Biomediated and Bioinspired Geotechnics. 2018.
[50] NACLERIO N D, HUBICKI C M, AYDIN Y O, et al. Soft robotic burrowing device with tip-extension and granular fluidization[C]// 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 2018: 5918-5923.
[51] SADEGHI A, DEL DOTTORE E, MONDINI A, et al. Passive morphological adaptation for obstacle avoidance in a self-growing robot produced by additive manufacturing[J]. Soft Robotics, 2020, 7(1): 85-94. doi: 10.1089/soro.2019.0025
[52] SADEGHI A, MONDINI A, MAZZOLAI B. Toward self-growing soft robots inspired by plant roots and based on additive manufacturing technologies[J]. Soft Robotics, 2017, 4(3): 211-223. doi: 10.1089/soro.2016.0080
[53] WEDDING L M, REITER S M, SMITH C R, et al. Managing mining of the deep seabed[J]. Science, 2015, 349(6244): 144-145. doi: 10.1126/science.aac6647
[54] JACOBSTEIN N, BELLINGHAM J, YANG G Z. Robotics for space and marine sciences[J]. Science Robotics, 2017, 2(7): eaan5594. doi: 10.1126/scirobotics.aan5594
[55] WINTER A G, V, DEITS R H, et al. Razor clam to RoboClam: burrowing drag reduction mechanisms and their robotic adaptation[J]. Bioinspiration & Biomimetics, 2014, 9(3): 036009. http://www.bioone.org/servlet/linkout?suffix=bibr23&dbid=16&doi=10.2983%2F035.034.0109&key=10.1088%2F1748-3182%2F9%2F3%2F036009
[56] TADAMI N, NAGAI M, NAKATAKE T, et al. Curved excavation by a sub-seafloor excavation robot[C]//2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). New York, 2017: 4950-4956.
[57] CHEN Y, KHOSRAVI A, MARTINEZ A, et al. Analysis of the self-penetration process of a bio-inspired in situ testing probe[C]// Proceeding of Geo-congress 2020: Biogeotechnics. Minneapolis, 2020: 224-232.
[58] HUANG S, TAO J. Bio-inspired dual-anchor burrowing: effect of vertical curvature of the shell[C]// Proceeding of Geo-Congress 2020: Biogeotechnics. Minneapolis, 2020: 282-292.
[59] KHOSRAVI A, MARTINEZ A, DEJONG J, et al. Discrete element simulations of bio-inspired self-burrowing probes in sands of varying density[C]// Proceedings of Biomediated and Bioinspired Geotechnics. 2018.
[60] MA Y F, CORTES D D. 2D DEM analysis of the interactions between bio-inspired geo-probe and soil during inflation-deflation cycles[J]. Granular Matter, 2020, 22(11): 1-14. doi: 10.1007/s10035-019-0974-7
[61] HUANG S C, TAO J L. Modeling clam-inspired burrowing in dry sand using cavity expansion theory and DEM[J]. Acta Geotechnica, 2020, 15(8): 2305-2326. doi: 10.1007/s11440-020-00918-8
[62] TANG Y, TAO J L. Multiscale analysis of rotational penetration in shallow dry sand and implications for self-burrowing robot design[J]. Acta Geotechnica, 2022, 17(10): 4233-4252. doi: 10.1007/s11440-022-01492-x
[63] MARVI H, BRIDGES J, HU D L. Snakes mimic earthworms: propulsion using rectilinear travelling waves[J]. Journal of the Royal Society Interface, 2013, 10(84): 20130188. doi: 10.1098/rsif.2013.0188
[64] HUANG L, MARTINEZ A. Load transfer anisotropy at snakeskin-inspired clay-structure interfaces[C]// Proceedings of International Foundations Congress and Equipment Expo 2021: Geoenvironmental Engineering, Geomaterial Modeling, Transportation Geotechnics, and Case Histories. Dallas, 2021: 119-129.
[65] ZHONG W H, LIU H L, WANG Q, et al. Investigation of the penetration characteristics of snake skin-inspired pile using DEM[J]. Acta Geotechnica, 2021, 16(6): 1849-1865. doi: 10.1007/s11440-020-01132-2
[66] BURRALL M, DEJONG J T, MARTINEZ A, et al. Vertical pullout tests of orchard trees for bio-inspired engineering of anchorage and foundation systems[J]. Bioinspiration & Biomimetics, 2020, 16(1): 016009. http://pubmed.ncbi.nlm.nih.gov/33252054/
[67] ALEALI S A, BANDINI P, NEWTSON C M. Multifaceted bioinspiration for improving the shaft resistance of deep foundations[J]. Journal of Bionic Engineering, 2020, 17(5): 1059-1074. doi: 10.1007/s42235-020-0076-6
[68] ZHU H, ZHANG L M. Root-soil-water hydrological interaction and its impact on slope stability[J]. Georisk: Assessment and Management of Risk for Engineered Systems and Geohazards, 2019, 13(4): 349-359. doi: 10.1080/17499518.2019.1616098
[69] TERO A, TAKAGI S, SAIGUSA T, et al. Rules for biologically inspired adaptive network design[J]. Science, 2010, 327(5964): 439-442. doi: 10.1126/science.1177894
[70] ARAB M G, OMAR M, ALOTAIBI E, et al. Bio-inspired 3D-printed honeycomb for soil reinforcement[C]// Geo-Congress 2020: Biogeotechnics. Reston, 2020: 262-271.
[71] 高玮. 基于蚁群聚类算法的岩石边坡稳定性分析[J]. 岩土力学, 2009, 30(11): 3476-3480. doi: 10.3969/j.issn.1000-7598.2009.11.043 GAO Wei. Analysis of stability of rock slope based on ant colony clustering algorithm[J]. Rock and Soil Mechanics, 2009, 30 (11): 3476-3480. (in Chinese) doi: 10.3969/j.issn.1000-7598.2009.11.043
[72] 高玮. 基于蚁群聚类算法的岩爆预测研究[J]. 岩土工程学报, 2010, 32(6): 874-880. http://www.cgejournal.com/cn/article/id/13417 GAO Wei. Prediction of rock burst based on ant colony clustering algorithm[J]. Chinese Journal of Geotechnical Engineering, 2010, 32(6): 874-880. (in Chinese) http://www.cgejournal.com/cn/article/id/13417
[73] FRATZL P. Biomimetic materials research: what can we really learn from nature's structural materials?[J]. Journal of the Royal Society Interface, 2007, 4(15): 637-642. doi: 10.1098/rsif.2007.0218
[74] QUILLIN K J. Ontogenetic scaling of burrowing forces in the earthworm Lumbricus terrestris[J]. Journal of Experimental Biology, 2000, 203(18): 2757-2770. doi: 10.1242/jeb.203.18.2757
[75] WEATHERSPOON C P. Sequoiadendron giganteum (Lindl. ) Buchholz Giant Sequoia[J]. Silvics of North America, 1990, 1: 552-562. http://www.calfire.ca.gov/resource_mgt/downloads/reports/GiantSequoia.pdf
[76] CHE J, DORGAN K M. It's tough to be small: dependence of burrowing kinematics on body size[J]. Journal of Experimental Biology, 2010, 213(8): 1241-1250. doi: 10.1242/jeb.038661
-
期刊类型引用(24)
1. 陈琼,崔德山,张扬景皓,朱俊峰. 一种新型环剪仪的研制及其应用. 地质科技通报. 2025(01): 205-215 .  百度学术
百度学术
2. 张卫雄,杨校辉,丁保艳,朱文杰,任永忠. 甘肃舟曲江顶崖滑坡堆积层剪切特性与强度参数分析. 中国地质灾害与防治学报. 2025(01): 65-72 . 百度学术
3. Yang Xue,Fasheng Miao,Yiping Wu,Linwei Li,Daniel Dias,Yang Tang. Probabilistic Assessment of Constitutive Model Parameters:Insight from a Statistical Damage Constitutive Model and a Simple Critical State Hypoplastic Model. Journal of Earth Science. 2025(02): 685-699 . 必应学术
4. 张兆雷. 滑带土力学性能及抗滑桩支护斜坡稳定分析. 黑龙江交通科技. 2025(04): 6-10 . 百度学术
5. 周葆春,王江伟,单丽霞,李颖,郎梦婷,孔令伟. 不同膨胀潜势等级的膨胀土残余强度环剪试验研究. 岩土工程学报. 2024(06): 1325-1331 . 本站查看
6. 鄢俊彪,孔令伟,李甜果,周振华. 膨胀土残余强度的变速率效应及工程启示. 岩土工程学报. 2024(07): 1445-1452 . 本站查看
7. 方永柱. 库岸边坡滑坡带土体特性试验研究. 陕西水利. 2024(07): 196-198 . 百度学术
8. 袁伟. 基于Midas对沿河滑坡的分析研究. 中国水运. 2024(08): 139-141 . 百度学术
9. 袁伟. 基于Midas对沿河滑坡的分析研究. 中国水运. 2024(15): 139-141 . 百度学术
10. 王家鑫,夏元友,王智德. 考虑滑面应变软化效应的边坡震后位移计算方法. 计算力学学报. 2024(06): 1029-1036 . 百度学术
11. 杜毅,晏鄂川,蔡静森,高旭,柳万里. 折线型复合式滑坡渐进破坏稳定性状态的力学判别. 岩土工程学报. 2023(06): 1151-1161 . 本站查看
12. 苗发盛,赵帆程,吴益平,孟佳佳. 基于渗透-环剪试验的三峡库区童家坪滑坡滑带土强度特性研究. 岩土工程学报. 2023(07): 1480-1489 . 本站查看
13. 黄淙葆,代张音,高威挺,罗庆丽. 贵州公路旁边坡滑带土抗剪强度特性研究. 地质与资源. 2023(03): 366-374 . 百度学术
14. 吴爽爽,胡新丽,孙少锐,魏继红. 间歇式滑坡变形力学机制与单体预警案例研究. 岩土力学. 2023(S1): 593-602 . 百度学术
15. 夏婷,代张音,杨银凯,赵昆. 含水率对滑带土抗剪强度的影响. 矿业工程研究. 2023(04): 60-66 . 百度学术
16. 赵帆程,苗发盛,吴益平,薛阳,孟佳佳. 不同环剪条件下三峡库区童家坪滑坡滑带土强度特性. 地质科技通报. 2022(02): 315-324 . 百度学术
17. 周洪福,张卓婷,韦玉婷. 基于滑体自重效应的滑带土强度参数取值方法. 岩石力学与工程学报. 2022(05): 1045-1053 . 百度学术
18. 唐雅婷,谭杰,李长冬,李炳辰,周文娟. 基于模型试验的动水驱动型顺层岩质滑坡启滑机制初探. 地质科技通报. 2022(06): 137-148 . 百度学术
19. 李政洋,袁伟,蒙焕伟. 高洞滑坡基本特征及形成机制分析. 中国水运(下半月). 2022(12): 109-111 . 百度学术
20. 付传林. 水库滑坡变形特征的数值分析. 水利科技与经济. 2022(12): 116-120 . 百度学术
21. 李政洋,袁伟,蒙焕伟. 高洞滑坡基本特征及形成机制分析. 中国水运. 2022(24): 109-111 . 百度学术
22. 任三绍,张永双,徐能雄,吴瑞安. 含砾滑带土残余强度与剪切面粗糙度的细观响应机制. 岩土工程学报. 2021(08): 1473-1482 . 本站查看
23. 张晓奇,胡新丽,刘忠绪,刘畅,吴爽爽. 呷爬滑坡滑带土蠕变特性及其稳定性. 地质科技通报. 2020(06): 145-153 . 百度学术
24. 张耀文,吴迪. 黏性土的残余强度及试验方法研究. 工程技术研究. 2019(24): 147-148+226 . 百度学术
其他类型引用(4)
-
其他相关附件
 下载:
下载:

计量
- 文章访问数: 972
- HTML全文浏览量: 140
- PDF下载量: 313
- 被引次数: 28